


Coursera - Control of Mobile Robots (Georgia Institute of Technology)

Coursera - Control of Mobile Robots (Georgia Institute of Technology)
WEBRip | English | MP4 | 960 x 540 | AVC ~62 kbps | 29.970 fps
AAC | 128 Kbps | 44.1 KHz | 2 channels | Subs: English (.srt) | 13:39:29 | 1.31 GB
Genre: eLearning Video / Programming, Robotics, Computer Engineering
WEBRip | English | MP4 | 960 x 540 | AVC ~62 kbps | 29.970 fps
AAC | 128 Kbps | 44.1 KHz | 2 channels | Subs: English (.srt) | 13:39:29 | 1.31 GB
Genre: eLearning Video / Programming, Robotics, Computer Engineering
Control of Mobile Robots is a course that focuses on the application of modern control theory to the problem of making robots move around in safe and effective ways. The structure of this class is somewhat unusual since it involves many moving parts - to do robotics right, one has to go from basic theory all the way to an actual robot moving around in the real world, which is the challenge we have set out to address through the different pieces in the course.The class will consist of lecture videos, which are between 8 and 12 minutes in length. These contain 1-2 integrated quiz questions per video. There will also be standalone homework and a final exam.
Magnus Egerstedt is a Professor in the School of Electrical and Computer Engineering at the Georgia Institute of Technology, where he has been on the faculty since 2001. He is an award-winning teacher, with awards from both Georgia Tech and Harvard University. Dr. Egerstedt received the M.S. degree in Engineering Physics and the Ph.D. degree in Applied Mathematics from the Royal Institute of Technology, Stockholm, Sweden, and the B.A. degree in Philosophy from Stockholm University. Dr. Egerstedt's research interests include motion planning, control, and coordination of (teams of) mobile robots, and he is the director of the Georgia Robotics and Intelligent Systems Laboratory (GRITS Lab). Magnus Egerstedt is a Fellow of the IEEE and a recipient of the CAREER Award from the U.S. National Science Foundation.
This course investigates how to make mobile robots move in effective, safe, and predictable ways. The basic tool for achieving this is "control theory", which deals with the question of how dynamical systems, i.e., systems whose behaviors change over time, can be effectively influenced. In the course, these two domains - controls and robotics - will be interleaved and we will go from the basics of control theory, via robotic examples of increasing complexity - all the way to the research frontier. The course will focus on mobile robots as the target application and problems that will be covered include (1) how to make (teams of) wheeled ground robots avoid collisions while reaching target locations, (2) how to make aerial, quadrotor robots follow paths in the presence of severe disturbances, and (3) how to locomotive bipedal, humanoid robots.
While the main focus of this course is theory, it is important to be able to map the theory onto an actual physical platform. As such, the course will provide detailed instructions on how to build a mobile robot from scratch as an optional part of the course. In addition, an introduction into microcontrollers, mechatronics, and electronics will be given so that, by the end of the course, the controllers developed in the course can run on an actual mobile robot.
The course will also feature optional programming assignments, which will focus on implementing the controllers developed in this course for a mobile robot. A MATLAB-based simulator will be available run controllers from the programming assignments on a simulated robot or on the mobilerobot built in this course. As a result of support from MathWorks, a downloadable license for MATLAB and course recommended toolboxes will be available for the duration of the MOOC.
├───01 - Week 1
│ ├───01 - Lecture Video 1.1 Control of Mobile Robots
│ ├───02 - Lecture Video 1.2 Whats Control Theory, Anyway
│ ├───03 - Lecture Video 1.3 On the Need for Models
│ ├───04 - Lecture Video 1.4 Cruise-Controllers
│ ├───05 - Lecture Video 1.5 Control Design Basics
│ ├───06 - Lecture Video 1.6 Performance Objectives
│ ├───07 - Lecture Video 1.7 PID Control
│ ├───08 - Lecture Video 1.8 Implementation
│ ├───09 - Glue Lecture 1
│ ├───10 - Programming Simulation Lecture 1
│ └───11 - Hardware Lecture 1
├───02 - Week 2
│ ├───01 - Lecture Video 2.1 Driving Robots Around
│ ├───02 - Lecture Video 2.2 Differential Drive Robots
│ ├───03 - Lecture Video 2.3 Odometry
│ ├───04 - Lecture Video 2.4 Sensors
│ ├───05 - Lecture Video 2.5 Behavior-Based Robotics
│ ├───06 - Lecture Video 2.6 Go-to-Goal
│ ├───07 - Lecture Video 2.7 The GRITS Simulator
│ ├───08 - Lecture Video 2.8 Obstacle Avoidance
│ ├───09 - Glue Lecture 2
│ ├───10 - Programming Simulation Lecture 2
│ └───11 - Hardware Lecture 2
├───03 - Week 3
│ ├───01 - Lecture Video 3.1 A Simple Robot
│ ├───02 - Lecture Video 3.2 State-Space Models
│ ├───03 - Lecture Video 3.3 Linearizations
│ ├───04 - Lecture Video 3.4 LTI Systems
│ ├───05 - Lecture Video 3.5 Stability
│ ├───06 - Lecture Video 3.6 Swarm Robotics
│ ├───07 - Lecture Video 3.7 Output Feedback
│ ├───08 - Lecture Video 3.8 State Feedback
│ ├───09 - Glue Lecture 3
│ ├───10 - Programming Simulation Lecture 3
│ └───11 - Hardware Lecture 3 - Warning Mistakes in Wiring Diagram (Correct in Slides)
├───04 - Week 4
│ ├───01 - Lecture Video 4.1 Stabilizing the Point Mass
│ ├───02 - Lecture Video 4.2 Pole-Placement
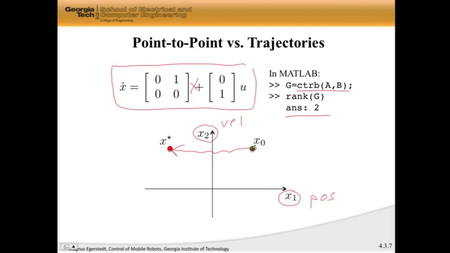
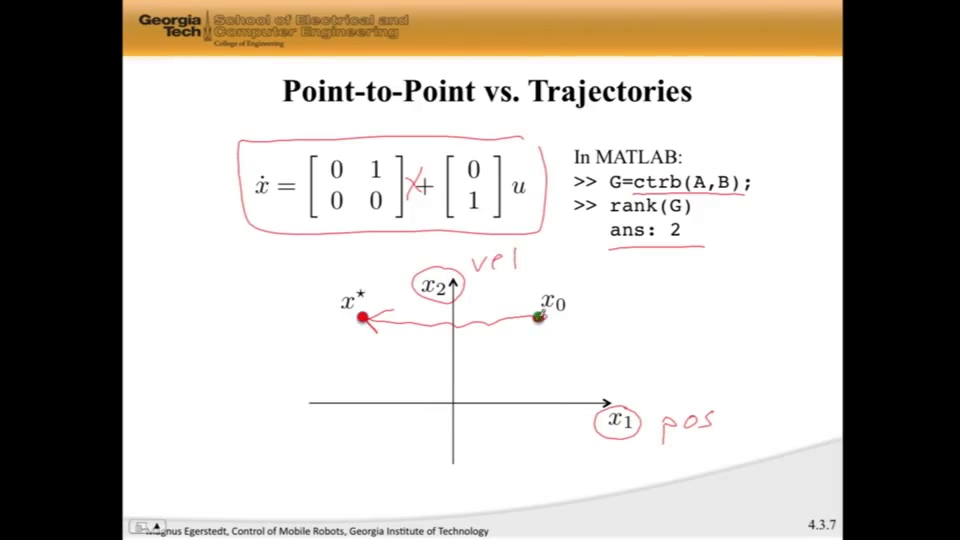
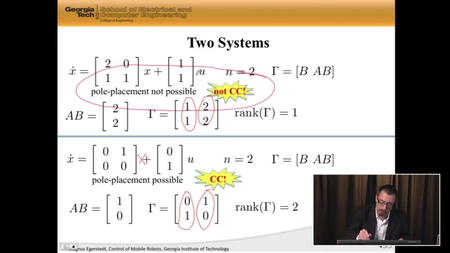
│ ├───03 - Lecture Video 4.3 Controllability
│ ├───04 - Lecture Video 4.4 Segway Robots
│ ├───05 - Lecture Video 4.5 Observers
│ ├───06 - Lecture Video 4.6 Observability
│ ├───07 - Lecture Video 4.7 The Separation Principle
│ ├───08 - Lecture Video 4.8 Practical Considerations
│ ├───09 - Glue Lecture 4
│ ├───10 - Programming Simulation Lecture 4
│ └───11 - Hardware Lecture 4
├───05 - Week 5
│ ├───01 - Lecture Video 5.1 Switches Everywhere
│ ├───02 - Lecture Video 5.2 Hybrid Automata
│ ├───03 - Lecture Video 5.3 A Counter-Example
│ ├───04 - Lecture Video 5.4 Danger - Beware
│ ├───05 - Lecture Video 5.5 The Bouncing Ball
│ ├───06 - Lecture Video 5.6 The Zeno Phenomenon
│ ├───07 - Lecture Video 5.7 Sliding Mode Control
│ ├───08 - Lecture Video 5.8 Regularizations
│ ├───09 - Glue Lecture 5
│ ├───10 - Programming Simulation Lecture 5
│ └───11 - Hardware Lecture 5
├───06 - Week 6
│ ├───01 - Lecture Video 6.1 Behaviors Revisited
│ ├───02 - Lecture Video 6.2 Hard Switches vs Blending
│ ├───03 - Lecture Video 6.3 Convex and Non-Convex Worlds
│ ├───04 - Lecture Video 6.4 Boundary Following
│ ├───05 - Lecture Video 6.5 The Induced Mode
│ ├───06 - Lecture Video 6.6 A Complete Navigation System
│ ├───07 - Lecture Video 6.7 Practical Considerations
│ ├───08 - Lecture Video 6.8 Lets Do it
│ ├───09 - Glue Lecture 6
│ ├───10 - Programming Simulation Lecture 6
│ └───11 - Hardware Lecture 6
└───07 - Week 7
├───01 - Lecture Video 7.1 Approximations and Abstractions
├───02 - Lecture Video 7.2 A Layered Architecture
├───03 - Lecture Video 7.3 Differential-Drive Trackers
├───04 - Lecture Video 7.4 A Clever Trick
├───05 - Lecture Video 7.5 Other Robot Classes
├───06 - Lecture Video 7.6 Car-Like Robots
├───07 - Lecture Video 7.7 To Probe Further
├───08 - Lecture Video 7.8 In Conclusion
├───09 - Glue Lecture 7
├───10 - Programming Simulation Lecture 7
└───11 - Hardware Lecture 7
│ ├───01 - Lecture Video 1.1 Control of Mobile Robots
│ ├───02 - Lecture Video 1.2 Whats Control Theory, Anyway
│ ├───03 - Lecture Video 1.3 On the Need for Models
│ ├───04 - Lecture Video 1.4 Cruise-Controllers
│ ├───05 - Lecture Video 1.5 Control Design Basics
│ ├───06 - Lecture Video 1.6 Performance Objectives
│ ├───07 - Lecture Video 1.7 PID Control
│ ├───08 - Lecture Video 1.8 Implementation
│ ├───09 - Glue Lecture 1
│ ├───10 - Programming Simulation Lecture 1
│ └───11 - Hardware Lecture 1
├───02 - Week 2
│ ├───01 - Lecture Video 2.1 Driving Robots Around
│ ├───02 - Lecture Video 2.2 Differential Drive Robots
│ ├───03 - Lecture Video 2.3 Odometry
│ ├───04 - Lecture Video 2.4 Sensors
│ ├───05 - Lecture Video 2.5 Behavior-Based Robotics
│ ├───06 - Lecture Video 2.6 Go-to-Goal
│ ├───07 - Lecture Video 2.7 The GRITS Simulator
│ ├───08 - Lecture Video 2.8 Obstacle Avoidance
│ ├───09 - Glue Lecture 2
│ ├───10 - Programming Simulation Lecture 2
│ └───11 - Hardware Lecture 2
├───03 - Week 3
│ ├───01 - Lecture Video 3.1 A Simple Robot
│ ├───02 - Lecture Video 3.2 State-Space Models
│ ├───03 - Lecture Video 3.3 Linearizations
│ ├───04 - Lecture Video 3.4 LTI Systems
│ ├───05 - Lecture Video 3.5 Stability
│ ├───06 - Lecture Video 3.6 Swarm Robotics
│ ├───07 - Lecture Video 3.7 Output Feedback
│ ├───08 - Lecture Video 3.8 State Feedback
│ ├───09 - Glue Lecture 3
│ ├───10 - Programming Simulation Lecture 3
│ └───11 - Hardware Lecture 3 - Warning Mistakes in Wiring Diagram (Correct in Slides)
├───04 - Week 4
│ ├───01 - Lecture Video 4.1 Stabilizing the Point Mass
│ ├───02 - Lecture Video 4.2 Pole-Placement
│ ├───03 - Lecture Video 4.3 Controllability
│ ├───04 - Lecture Video 4.4 Segway Robots
│ ├───05 - Lecture Video 4.5 Observers
│ ├───06 - Lecture Video 4.6 Observability
│ ├───07 - Lecture Video 4.7 The Separation Principle
│ ├───08 - Lecture Video 4.8 Practical Considerations
│ ├───09 - Glue Lecture 4
│ ├───10 - Programming Simulation Lecture 4
│ └───11 - Hardware Lecture 4
├───05 - Week 5
│ ├───01 - Lecture Video 5.1 Switches Everywhere
│ ├───02 - Lecture Video 5.2 Hybrid Automata
│ ├───03 - Lecture Video 5.3 A Counter-Example
│ ├───04 - Lecture Video 5.4 Danger - Beware
│ ├───05 - Lecture Video 5.5 The Bouncing Ball
│ ├───06 - Lecture Video 5.6 The Zeno Phenomenon
│ ├───07 - Lecture Video 5.7 Sliding Mode Control
│ ├───08 - Lecture Video 5.8 Regularizations
│ ├───09 - Glue Lecture 5
│ ├───10 - Programming Simulation Lecture 5
│ └───11 - Hardware Lecture 5
├───06 - Week 6
│ ├───01 - Lecture Video 6.1 Behaviors Revisited
│ ├───02 - Lecture Video 6.2 Hard Switches vs Blending
│ ├───03 - Lecture Video 6.3 Convex and Non-Convex Worlds
│ ├───04 - Lecture Video 6.4 Boundary Following
│ ├───05 - Lecture Video 6.5 The Induced Mode
│ ├───06 - Lecture Video 6.6 A Complete Navigation System
│ ├───07 - Lecture Video 6.7 Practical Considerations
│ ├───08 - Lecture Video 6.8 Lets Do it
│ ├───09 - Glue Lecture 6
│ ├───10 - Programming Simulation Lecture 6
│ └───11 - Hardware Lecture 6
└───07 - Week 7
├───01 - Lecture Video 7.1 Approximations and Abstractions
├───02 - Lecture Video 7.2 A Layered Architecture
├───03 - Lecture Video 7.3 Differential-Drive Trackers
├───04 - Lecture Video 7.4 A Clever Trick
├───05 - Lecture Video 7.5 Other Robot Classes
├───06 - Lecture Video 7.6 Car-Like Robots
├───07 - Lecture Video 7.7 To Probe Further
├───08 - Lecture Video 7.8 In Conclusion
├───09 - Glue Lecture 7
├───10 - Programming Simulation Lecture 7
└───11 - Hardware Lecture 7
also You can watch my other helpful: Coursera-posts
General
Complete name : 4 - 3 - Lecture Video 4.3 Controllability.mp4
Format : MPEG-4
Format profile : Base Media
Codec ID : isom (isom/iso2/avc1/mp41)
File size : 14.4 MiB
Duration : 10 min 9 s
Overall bit rate : 198 kb/s
Encoded date : UTC 1970-01-01 00:00:00
Tagged date : UTC 1970-01-01 00:00:00
Writing application : Lavf53.29.100
Video
ID : 1
Format : AVC
Format/Info : Advanced Video Codec
Format profile : High@L3.1
Format settings : CABAC / 4 Ref Frames
Format settings, CABAC : Yes
Format settings, RefFrames : 4 frames
Codec ID : avc1
Codec ID/Info : Advanced Video Coding
Duration : 10 min 9 s
Bit rate : 62.0 kb/s
Width : 960 pixels
Height : 540 pixels
Display aspect ratio : 16:9
Frame rate mode : Constant
Frame rate : 29.970 (30000/1001) FPS
Color space : YUV
Chroma subsampling : 4:2:0
Bit depth : 8 bits
Scan type : Progressive
Bits/(Pixel*Frame) : 0.004
Stream size : 4.50 MiB (31%)
Writing library : x264 core 120 r2120 0c7dab9
Encoding settings : cabac=1 / ref=3 / deblock=1:0:0 / analyse=0x3:0x113 / me=hex / subme=7 / psy=1 / psy_rd=1.00:0.00 / mixed_ref=1 / me_range=16 / chroma_me=1 / trellis=1 / 8x8dct=1 / cqm=0 / deadzone=21,11 / fast_pskip=1 / chroma_qp_offset=-2 / threads=12 / sliced_threads=0 / nr=0 / decimate=1 / interlaced=0 / bluray_compat=0 / constrained_intra=0 / bframes=3 / b_pyramid=2 / b_adapt=1 / b_bias=0 / direct=1 / weightb=1 / open_gop=0 / weightp=2 / keyint=250 / keyint_min=25 / scenecut=40 / intra_refresh=0 / rc_lookahead=40 / rc=crf / mbtree=1 / crf=28.0 / qcomp=0.60 / qpmin=0 / qpmax=69 / qpstep=4 / ip_ratio=1.40 / aq=1:1.00
Encoded date : UTC 1970-01-01 00:00:00
Tagged date : UTC 1970-01-01 00:00:00
Audio
ID : 2
Format : AAC
Format/Info : Advanced Audio Codec
Format profile : LC
Codec ID : mp4a-40-2
Duration : 10 min 9 s
Bit rate mode : Constant
Bit rate : 128 kb/s
Channel(s) : 2 channels
Channel positions : Front: L R
Sampling rate : 44.1 kHz
Frame rate : 43.066 FPS (1024 SPF)
Compression mode : Lossy
Stream size : 9.29 MiB (65%)
Default : Yes
Alternate group : 1
Encoded date : UTC 1970-01-01 00:00:00
Tagged date : UTC 1970-01-01 00:00:00
Complete name : 4 - 3 - Lecture Video 4.3 Controllability.mp4
Format : MPEG-4
Format profile : Base Media
Codec ID : isom (isom/iso2/avc1/mp41)
File size : 14.4 MiB
Duration : 10 min 9 s
Overall bit rate : 198 kb/s
Encoded date : UTC 1970-01-01 00:00:00
Tagged date : UTC 1970-01-01 00:00:00
Writing application : Lavf53.29.100
Video
ID : 1
Format : AVC
Format/Info : Advanced Video Codec
Format profile : High@L3.1
Format settings : CABAC / 4 Ref Frames
Format settings, CABAC : Yes
Format settings, RefFrames : 4 frames
Codec ID : avc1
Codec ID/Info : Advanced Video Coding
Duration : 10 min 9 s
Bit rate : 62.0 kb/s
Width : 960 pixels
Height : 540 pixels
Display aspect ratio : 16:9
Frame rate mode : Constant
Frame rate : 29.970 (30000/1001) FPS
Color space : YUV
Chroma subsampling : 4:2:0
Bit depth : 8 bits
Scan type : Progressive
Bits/(Pixel*Frame) : 0.004
Stream size : 4.50 MiB (31%)
Writing library : x264 core 120 r2120 0c7dab9
Encoding settings : cabac=1 / ref=3 / deblock=1:0:0 / analyse=0x3:0x113 / me=hex / subme=7 / psy=1 / psy_rd=1.00:0.00 / mixed_ref=1 / me_range=16 / chroma_me=1 / trellis=1 / 8x8dct=1 / cqm=0 / deadzone=21,11 / fast_pskip=1 / chroma_qp_offset=-2 / threads=12 / sliced_threads=0 / nr=0 / decimate=1 / interlaced=0 / bluray_compat=0 / constrained_intra=0 / bframes=3 / b_pyramid=2 / b_adapt=1 / b_bias=0 / direct=1 / weightb=1 / open_gop=0 / weightp=2 / keyint=250 / keyint_min=25 / scenecut=40 / intra_refresh=0 / rc_lookahead=40 / rc=crf / mbtree=1 / crf=28.0 / qcomp=0.60 / qpmin=0 / qpmax=69 / qpstep=4 / ip_ratio=1.40 / aq=1:1.00
Encoded date : UTC 1970-01-01 00:00:00
Tagged date : UTC 1970-01-01 00:00:00
Audio
ID : 2
Format : AAC
Format/Info : Advanced Audio Codec
Format profile : LC
Codec ID : mp4a-40-2
Duration : 10 min 9 s
Bit rate mode : Constant
Bit rate : 128 kb/s
Channel(s) : 2 channels
Channel positions : Front: L R
Sampling rate : 44.1 kHz
Frame rate : 43.066 FPS (1024 SPF)
Compression mode : Lossy
Stream size : 9.29 MiB (65%)
Default : Yes
Alternate group : 1
Encoded date : UTC 1970-01-01 00:00:00
Tagged date : UTC 1970-01-01 00:00:00
Screenshots

Coursera - Control of Mobile Robots (Georgia Institute of Technology)

Coursera - Control of Mobile Robots (Georgia Institute of Technology)
Coursera - Control of Mobile Robots (Georgia Institute of Technology)

Coursera - Control of Mobile Robots (Georgia Institute of Technology)

✅ Exclusive eLearning Videos ParRus-blog ← add to bookmarks
Feel free to contact me PM
when links are dead or want any repost
Feel free to contact me PM
when links are dead or want any repost

Coursera - Control of Mobile Robots (Georgia Institute of Technology)
